11. 模式匹配 [练习区]
模式匹配
现在,你已经知道如何迭代 2D 数组。下一项任务是:使用你所学的知识,根据某些传感器测量结果,在 2D 世界中定位机器人。
在本例中,一个机器人正在一个 5x4 的橙色和蓝色世界中行走,如下所示。这个机器人安装有一个传感器,可以告诉它目前正处于什么颜色的方格中, 以及 它正右边方格的颜色。
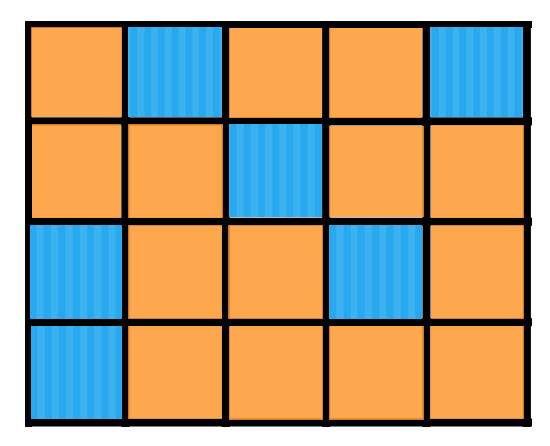
2D 橙色和蓝色世界方格
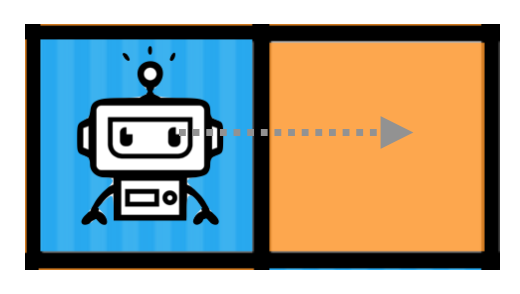
机器人感应两个颜色方格(一个在脚下,一个在右边)
在 Python 代码中,世界和传感器测量数据可以用下面的代码表示(其中“o”代表橙色,“b”代表蓝色):
import numpy as np
world = np.array ([ ['o', 'b', 'o', 'o', 'b'],
['o', 'o', 'b', 'o', 'o'],
['b', 'o', 'o', 'b', 'o'],
['b', 'o', 'o', 'o', 'o'] ])
measurement = ['b', 'o']现在,根据测量结果和世界网格上的颜色模式,我们很容易判断出,这个机器人在世界上只可能位于少数几个地方!在这个练习中,你需要以编程的方式找到这些位置。
提示 :你需要把值添加到列表中。要添加索引,请使用追加函数,格式为 list_name.append([row,column])。进一步的说明可以在下面的 TODO 中找到。
Start Quiz: